
| Previous Top Next |
| Building the Controller - Fin Oscillations |
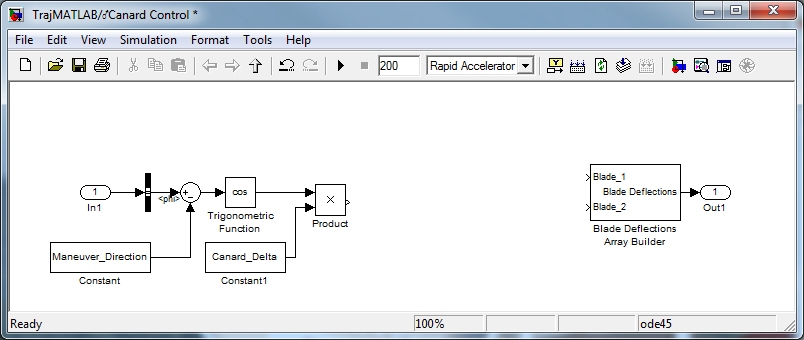
Let's now take the Cosine of the error between maneuver direction and roll angle. Drag a Trig Function Block from the Library Browser under Math Operations and connect it to the output of the Sum. You will need to open the Trig Function block and change it from Sin to Cos. This will generate the desired oscillation with an amplitude of 1. We'd like to be able to control the maximum Canard deflection from PRODAS. We'll create another constant called Canard_Delta and use a Product Block (Library Browser, Math Operations menu) to multiply this constant by the cosine of the roll angle.
The output of the above logic is what we want for the deflection of Canard 1. Go ahead and connect the output of the Product Block to Blade 1. Canard 2 will need to deflect in the opposite direction so we'll apply a gain of -1 to the Canard 2 signal. Drag a Gain Block from the Library Browser (Commonly Used Blocks menu) and connect as shown below. Open the Gain Block and change the gain to -1.
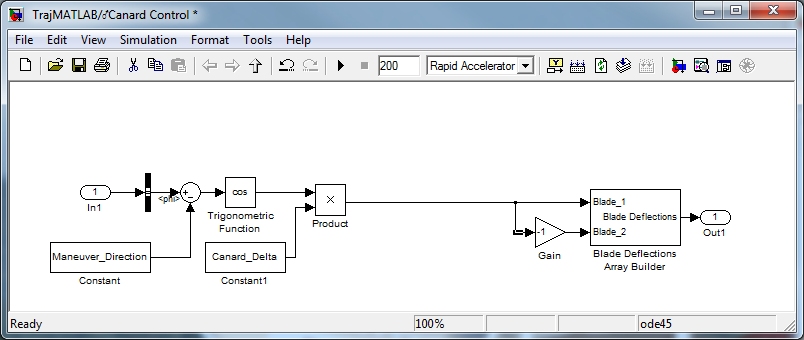
Now we've completed a control system that will provide the desired oscillation of the Canards. Next we'll add the capability to control the time at which the maneuver starts and a switch to turn guidance on or off.
| © 2011 Arrow Tech Associates |