
| Previous Top Next |
| Build the Canard Controller |
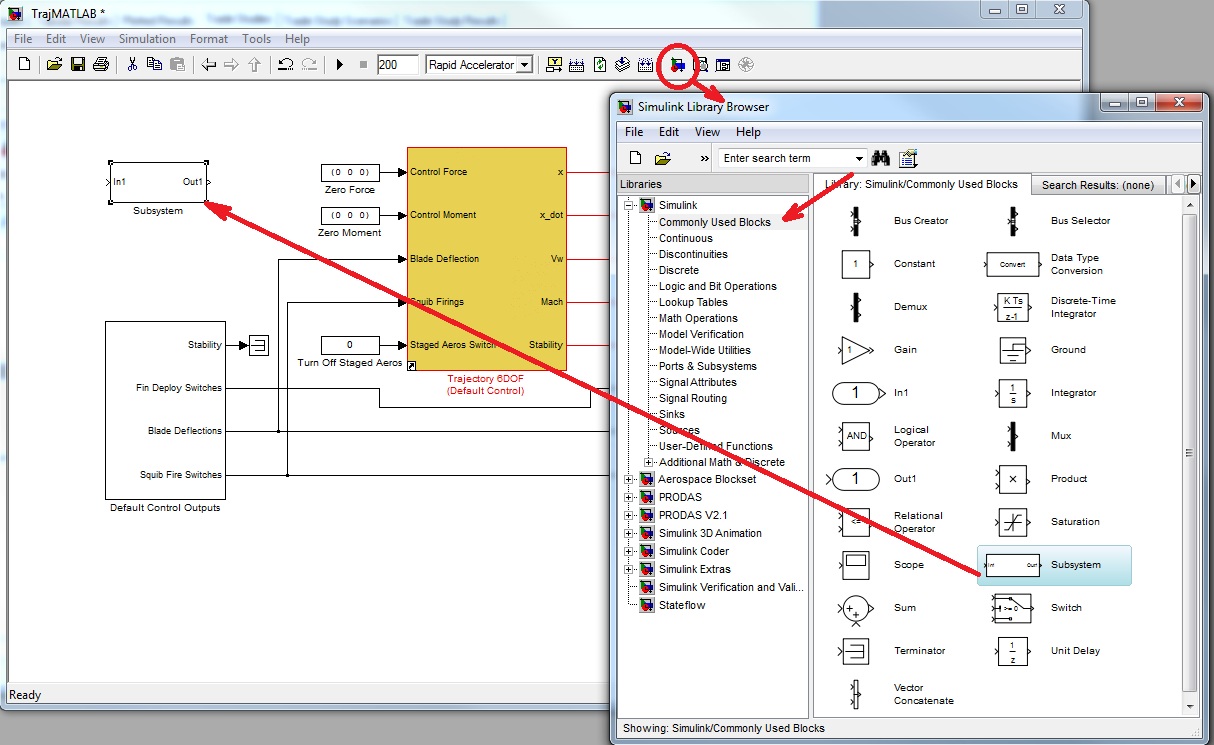
First we're going to add a subsystem block to the block diagram to house the Canard Control. Open the Library Browser, click on the "Commonly Used Blocks" in the menu and scroll down to find the "Subsystem Block". Drag the block into the block diagram as shown below. Double click on the name and change it to "Canard Control".
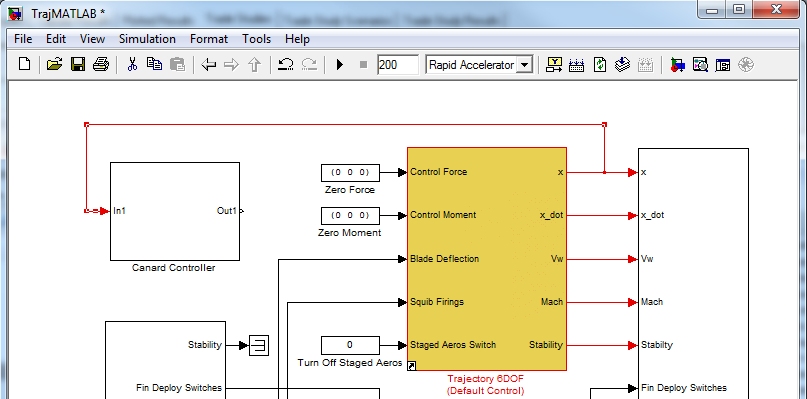
Our controller will cause the canards to oscillate at the roll rate of the projectile in order to maneuver in a desired direction. We will need the roll angle of the projectile as an input to the control. The "x" vector that is an output of the Trajectory block is an 18 element array with the body state variables from the flight simulation. The first 6 are the body states followed by the 6 derivatives of the body states. The last 6 elements include the four quarternions and two parameters describing the 7th DOF. Add a connection from the "x" signal to the "In1" port on the "Canard Control" block as shown below. This will make the full body state vector available to the control.
If you are using an evaluation copy, add a Memory block (Simulink Library Browser -> Discrete) inline on the state vector feedback signal. This will prevent an algebraic loop, but result in an maneuver direction orientation offset. The simulation results will be different for this configuration. Decrease the maximum simulation step size to lessen the effect of the delay.
Next we'll work on connecting the output of the controller to the Canards.
| © 2011 Arrow Tech Associates |